+86-13073105066
admin@longshubearing.com







Продукция





-

Нефтепромысловые подшипники
-

Брендовые подшипники SKF
-

Автомобильные подшипники-Подшипники коробки передач
-

Подшипники для сельскохозяйственной техники
-
Подшипники для линейных направляющих
-

Брендовые подшипники NSK
-

Автомобильные подшипники-Ступичные подшипники
-

Подшипники для горных велосипедов
-

Брендовые подшипники FAG
-

Подшипники для БПЛА
-

Брендовые подшипники INA
-

Автомобильные подшипники-Ремонтные подшипники рулевого механизма
-

Керамические подшипники с шариками из нитрида кремния
-

Подшипники по индивидуальному заказу
-
Электроизолированные подшипники
-

Автомобильные подшипники-Выжимные подшипники сцепления




















Подшипники для роботов и манипуляторов
Подшипники для роботов являются ключевыми комплектующими промышленных роботов. Они главным образом применяются в шарнирах манипуляторов, поворотных узлах и прецизионных поворотных столах. Их характеристики напрямую влияют на плавность хода, повторяемость позиционирования и рабочую надёжность робота.
Описание
маркер
Описание продукта
Подшипники для роботов являются ключевыми комплектующими промышленных роботов. Они главным образом применяются в шарнирах манипуляторов, поворотных узлах и прецизионных поворотных столах. Их характеристики напрямую влияют на плавность хода, повторяемость позиционирования и рабочую надёжность робота. К основным типам относятся подшипники с перекрестными роликами, тонкостенные подшипники, подшипники волновых редукторов и шарнирные подшипники. Среди них подшипники с перекрестными роликами занимают лидирующее положение, поскольку способны одновременно воспринимать радиальные и осевые нагрузки, а также опрокидывающий момент. В некоторых изделиях для повышения характеристик применяются такие технологии, как керамические шарики из нитрида кремния и суперфинишная обработка поверхностей.
Подшипники для промышленных роботов главным образом подразделяются на тонкостенные подшипники равного сечения, подшипники с перекрестными роликами, подшипники волновых редукторов, шарнирные подшипники, подшипники RV-редукторов, а также подшипники электродвигателей и подшипники ходовых винтов.
Технология проектирования
Принцип проектирования подшипников, комплектующих промышленные роботы, должен предусматривать многокритериальную оптимизацию, в которой в качестве целевых функций принимаются три показателя: номинальная динамическая грузоподъёмность, жёсткость и момент трения. К ключевым технологиям относятся теория контакта качения, анализ динамических нагрузок, тепловой анализ и оценка надёжности. Теория контакта качения описывает контактные напряжения и деформационное поведение поверхностей качения, позволяя прогнозировать усталостную долговечность и несущую способность подшипника. Анализ динамических нагрузок моделирует характеристики подшипника в условиях динамического нагружения. Тепловой анализ позволяет прогнозировать распределение температур и термические напряжения в подшипнике, обеспечивая его стабильность и надёжность при высоких температурах. Оценка надёжности на основе вероятностных моделей и статистического анализа позволяет прогнозировать и предотвращать потенциальные отказы.
Технология изготовления и прецизионной механической обработки
К ключевым технологиям производства подшипников для роботов относятся: технология точного контроля отрицательного зазора в тонкостенных подшипниках; контроль монтажной высоты тонкостенных радиально-упорных шарикоподшипников; технология сборки тонкостенных подшипников; технология бесконтактного измерения внутреннего и наружного диаметров колец тонкостенных подшипников. К конкретным процессам также относятся: технология чистового шлифования колец подшипников на основе контроля слоя шлифовального наклёпа; горячее изостатическое прессование, позволяющее снизить остаточные напряжения в подшипнике на 60%; закалка в контролируемой атмосфере, обеспечивающая контроль деформации в пределах 0,02 мм.
")
")
")
")
связаться с нами
Сопутствующие популярные продукты

Подшипники для ветроэнергетики
Подшипники для ветроэнергетики являются ключевыми компонентами ветроэнергетических установок. По расположению и функции в ветрогенераторе они подразделяются главным образом на подшипники рыскания, подшипники питча (поворота лопастей), подшипники главного вала, подшипники редуктора (мультипликатора) и подшипники генератора.
Брендовые подшипники SKF
Импортные подшипники — это понятие, противопоставляемое подшипникам китайского производства. Импортные подшипники — это не только мощная поддержка бренда, передовые научные концепции и инновации, но и совершенное послепродажное обслуживание, а также сильное расширение ассортимента продукции.
Брендовые подшипники NSK
Импортные подшипники — это понятие, противопоставляемое подшипникам китайского производства. Импортные подшипники — это не только мощная поддержка бренда, передовые научные концепции и инновации, но и совершенное послепродажное обслуживание, а также сильное расширение ассортимента продукции.

Высокоскоростные коррозионностойкие подшипники
Высокоскоростные подшипники — это подшипники качения, у которых значение Dmn превышает 1,0×10⁶ мм·об/мин. Их эксплуатационные характеристики определяются произведением среднего диаметра Dm на частоту вращения внутреннего кольца n; они предназначены для высокоточных и высокоскоростных применений.
Автомобильные подшипники-Подшипники коробки передач
Подшипники коробки передач — это ключевые механические компоненты автомобильной трансмиссии, предназначенные для поддержания вращающихся валов и снижения трения. При их повреждении появляются такие симптомы, как шум, повышение температуры, посторонние звуки на нейтральной передаче, что требует своевременного ремонта и замены.
Нефтепромысловые подшипники
Продуктовый ряд: шарикоподшипники с глубоким желобом, цилиндрические роликоподшипники, сферические роликоподшипники, конические роликоподшипники, упорные роликоподшипники, радиально-упорные шарикоподшипники, упорные шарикоподшипники, подшипники для нефтяного оборудования, подшипники для железнодорожных локомотивов, подшипники редукторов, подшипники гидронасосов, ступичные подшипники грузовых автомобилей, подшипники прокатных станов, разъёмные подшипники, прецизионные подшипники для станков, а также ряд метрических и дюймовых прецизионных подшипников.
Подшипники для сельскохозяйственной техники
Подшипники для сельскохозяйственной техники являются важнейшими базовыми компонентами сельскохозяйственных машин и широко применяются в тракторах, пресс-подборщиках, комбайнах и других видах сельскохозяйственной техники. Точность, эксплуатационные характеристики, срок службы и надёжность подшипников для сельскохозяйственной техники играют решающую роль в сельскохозяйственных машинах.
Брендовые подшипники INA
Импортные подшипники — это понятие, противопоставляемое подшипникам китайского производства. Импортные подшипники — это не только мощная поддержка бренда, передовые научные концепции и инновации, но и совершенное послепродажное обслуживание, а также сильное расширение ассортимента продукции.
Автомобильные подшипники-Ступичные подшипники
Ступичный подшипник является одним из ключевых компонентов автомобиля. Его основная функция — нести вес и обеспечивать точное направление вращения ступицы, что требует от него способности выдерживать как осевые, так и радиальные нагрузки.
Автомобильные подшипники-Выжимные подшипники сцепления
Подшипник выключения сцепления автомобиля является ключевым компонентом трансмиссии автомобиля. Он устанавливается между сцеплением и коробкой передач и, координируя вращательное и осевое движение рычагов выключения, обеспечивает плавное включение и выключение сцепления, снижает износ и продлевает срок службы трансмиссии.

Подшипники из нержавеющей стали
По сравнению с обычными подшипниками, подшипники из нержавеющей стали имеют очевидные преимущества не только по материалу, но и с точки зрения технологии и контроля точности: требования к ним значительно строже, чем к обычным подшипникам. В процессе работы подшипники из нержавеющей стали работают стабильно, имеют низкий уровень шума, обладают коррозионной стойкостью и широко применяются.
Электроизолированные подшипники
В электроизолированных подшипниках используется специальный процесс напыления для нанесения высококачественного покрытия на наружную поверхность подшипника.
Подшипники для горных велосипедов
Подшипники горного велосипеда являются одними из ключевых компонентов, влияющих на комфорт при езде. Обычно они скрыты в таких узлах, как втулки, каретка, рулевая колонка, и, хотя малозаметны, выполняют важную функцию по снижению трения и обеспечению плавного вращения деталей. Знание типов подшипников, а также их обслуживания и замены помогает поддерживать велосипед в хорошем состоянии и продлевает срок его службы.
Керамические подшипники с шариками из нитрида кремния
Керамические шарикоподшипники — это промышленные подшипники, в которых телами качения являются керамические материалы. В них, как правило, применяется комбинированная конструкция из керамических шариков (горячепрессованный нитрид кремния Si₃N₄ или диоксид циркония) и металлических колец.
Подшипники по индивидуальному заказу
Возможно изготовление подшипников любых моделей и размеров по индивидуальным требованиям заказчика.
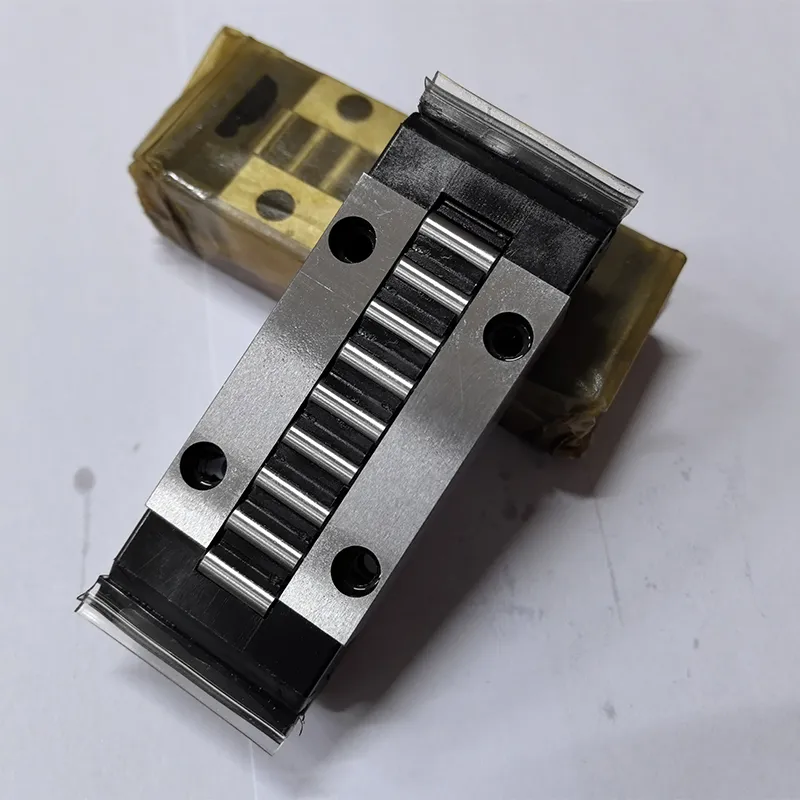
Подшипники для линейных направляющих
Линейная направляющая, также известная как линейный рельс, направляющая скольжения и линейная направляющая рельс, представляет собой устройство, используемое для направления механических компонентов в заданном направлении с целью обеспечения высокоточного линейного перемещения с низким трением.